![九游会·[中国]官方网站](/uploads/allimg/20241126/1-2411261HJN08.ico)
六自由度运动平台应用广泛,其位置逆解的计算和模拟极具研究价值。借助Matlab/Simulink等软件工具,我们进行了深入研究与验证,成果显著。现在,我们将进一步深入分析。
六自由度运动平台概述
Stewart并联平台,亦称六自由度运动平台,其研究始于1965年。德国工程师Stewart首次提出,采用六自由度并联机构制造飞行模拟器。该平台由上下两个平台、六个可伸缩杆件及连接的铰链构成。上平台作为负载平台,具备移动能力。支杆可以伸缩,这使得负载平台能在空间内进行六个方向的自由运动,具备众多优势。

研究的重要性
研究六自由度运动平台的位置逆解及仿真,对于机构运动控制和结构优化至关重要。这一研究在众多位姿控制应用中体现出实用价值。比如,在飞行模拟训练中,精确的位置逆解能显著增强模拟的真实感,提高训练效果;而在工业自动化生产领域,它则有助于保证操作的精确度。
Matlab与Simulink简介

Matlab是一款科学计算的高精度软件,集成了计算、可视化和编程等多样化功能。它不仅能够执行数学运算,还能构建模型和进行仿真。Simulink作为Matlab的核心,主要用途是对动态系统进行建模、仿真和分析。Simulink里的SimMechanics工具包是matlab6.5版本中新加入的,它可以用来构建机械结构的物理模型,还能进行联合仿真测试。这个工具包为机构运动学分析和模型构建提供了技术支持。
运动学分析与逆解模型建立
运用D-H法对六自由度运动平台进行运动学分析。在Matlab/Simulink仿真系统中,我们搭建了位置逆解模型。通过精确计算和模拟平台各杆件的长度变化和角度关系,我们成功构建了逆解模型,为后续的仿真实验奠定了坚实的基础。
物理模型与验证系统搭建
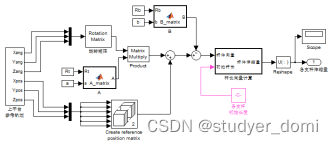

使用Simulink软件的SimMechanics工具包,我们搭建了一个具有六个自由度的运动平台模型。这个模型依据平台的结构和运动特性进行了详细设计,确保了其精确性和可靠性。在Simulink平台上,我们建立了仿真验证系统,并将物理模型与逆解模型成功结合,形成了一个完整的仿真体系。
仿真验证与结果分析
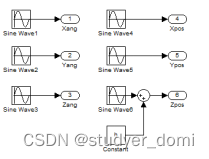
输入预定的运动轨迹,进行相应的模拟试验。在实践操作中,使用正弦波等信号来模拟实际路径。模拟结果显示误差较小,与预期结果相吻合,这充分验证了位置逆解模型的精确性。由此可以看出,从分析到建模再到验证的整个过程,都是科学且行之有效的。
在使用六自由度运动平台时,大家是否遇到过与位置逆解模型相关的问题?欢迎您在评论区分享您的使用体验。另外,别忘了点赞并分享这篇文章。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.tafengtian.com/html/tiyuwenda/9856.html